16. Compatibilidad con RV-C
16.1. Introducción a RV-C
Victron admite el protocolo RV-C a partir de Venus OS v2.90.
¿Qué es el protocolo RV-C?
RV-C (Recreation Vehicle (caravanas)-CAN) es un protocolo de comunicación basado en CAN-bus, similar a NMEA 2000 para los barcos. Se utiliza mucho en EE. UU. para que los componentes y los aparatos de la caravana se comuniquen entre sí.
RV-C tiene dos funciones básicas:
RV-C out: Permite controlar y monitorizar dispositivos de Victron desde un panel de control RV-C.
RV-C in: Permite que los dispositivos GX de Victron reciban y muestren datos de dispositivos RV-C de terceros compatibles.
En resumen, cuando esta opción está habilitada con el dispositivo GX conectado a una red RV-C, un panel de control RV-C puede leer datos de Victron, p. ej.: desde un BMV o un inversor/cargador, y mostrárselos al usuario e incluso controlar algunos de ellos. Los dispositivos RV-C compatibles aparecen en la unidad GX al mismo tiempo.
RV-C se crea sobre SAE J1939.
16.2. Limitaciones
Dispositivos VE.Can
Los protocolos RV-C y VE.Can no son compatibles. Un puerto VE.Can de un dispositivo GX se puede configurar para el perfil VE.Can o para el perfil RV-C, pero no para los dos a la vez.
Algunos dispositivos GX solo tienen un puerto VE.Can totalmente funcional. Por lo tanto, cuando se necesita conectividad RV-C, esto limita los dispositivos que se pueden usar en el sistema.
Productos habitualmente asociados a las caravanas que no podrían usarse en la situación descrita anteriormente:
No se puede usar el Lynx Smart BMS ni el Lynx BMS NG porque necesitan una conexión VE.Can. Use un VE.Bus BMS en su lugar (se conecta por VE.Bus).
El Lynx Smart Shunt no es compatible, use un SmartShunt en su lugar (se conecta mediante VE.Direct).
El regulador de alternador Wakespeed no puede monitorizarse mediante el dispositivo GX.
Los controladores de carga MPPT de alta potencia deben conectarse mediante VE.Direct y no por VE.Can.
Compatibilidad de dispositivos GX
En función del diseño del sistema, esta limitación afecta a la elección del dispositivo GX:
Color Control GX (CCGX), MultiPlus-II GX y EasySolar-II GX: Solo tienen un puerto VE.Can, que puede configurarse para VE.Can o RV-C, no para los dos. Por ejemplo, no se puede usar un Lynx Smart BMS y conectarlo a una red RV-C al mismo tiempo.
Cerbo GX y Cerbo-S GX: Igual que antes, estos modelos solo tienen un puerto VE.Can completamente funcional. De nuevo, puede ser VE.Can o RV-C, pero no los dos.
Nota
Nota: El puerto BMS-Can del Cerbo GX está limitado y no puede usarse para RV-C.
Cerbo GX MK2: Casi idéntico que el Cerbo GX, pero con dos puertos VE.Can, de modo que permite la conexión simultánea de redes VE.Can y RV-C.
Venus GX: Equipado con dos puertos VE.Can, de modo que permite la conexión simultánea de redes VE.Can y RV-C.
Ekrano GX: También tiene dos puertos VE.Can y puede conectarse a las dos redes, VE.Can y RV-C, a la vez.
16.3. Dispositivos compatibles
A partir de Venus v2.90, se ha incorporado compatibilidad con la salida RV-C en varios productos de Victron. Los siguientes dispositivos son compatibles:
Producto Victron | Observaciones |
|---|---|
Inversor/cargador VE.Bus | Las funciones de inversor y cargador puede controlarse por separado (on/off) mediante RV-C. También se puede fijar un límite de corriente de entrada de la red. |
Cargador Smart IP43 120-240 V | Puede encenderse y apagarse mediante RV-C. Se puede configurar un límite de corriente de entrada de la red. |
Cargador Smart IP43 230 V | Es de solo lectura mediante RV-C. No puede controlarse. |
Skylla-i y Skylla-IP44/-IP65 | Necesita dos interfaces CAN-bus completamente funcionales. Por ahora, solo lo aceptan Venus GX, Cerbo GX MK2 y Ekrano GX. |
Inversor VE.Direct | |
Inversor Smart e Inversor RS | |
Cargadores solares, incl. MPPT RS | |
Baterías:
| |
Depósitos: Son compatibles los datos del nivel del depósito de las siguientes fuentes de entrada:
|
16.4. Configuración de RV-C
El RV-C se configura mediante el dispositivo GX:
Una vez seleccionado, el perfil RV-C pasará a estar activo y el perfil seleccionado anteriormente se desactivará (los equipos asociados, como los dispositivos VE.Can, ya no estarán disponibles en la interfaz gráfica del usuario). |    |
16.4.1. Configuración de dispositivos con RV-C out
Los dispositivos con RV-C out pueden configurarse desde el submenú Dispositivos del menú del Puerto VE.Can. | |
El submenú Dispositivos contiene todos los dispositivos de la red RV-C incluidos los dispositivos RV-C out. Estos últimos se identifican mediante su [VRM# instance], que puede usarse para determinar los dispositivos “reales” del menú raíz del dispositivo GX. El hexadecimal de la parte derecha es la Dirección de origen. |  |
Cuando entre en el submenú de un dispositivo RV-C, verá la información general del dispositivo RV-C y, desplazándose hacia el final de la página, el menú de configuración. Para poder ver el menú de configuración se necesita tener acceso de usuario e instalador por lo menos. Véase el apartado Estructura del menú y parámetros configurables |  |
La instancia para los DGN correspondientes puede modificarse en el submenú de Configuración. |  |
16.5. Compatibilidad de Garnet SeeLeveL II 709-RVC y el dispositivo GX de Victron
Con la compatibilidad de RV-C con Venus OS, también se pueden usar el SeeLeveL 709-RVC y el SeeLeveL Soul de Garnet para mostrar datos del nivel del depósito en el dispositivo GX y en VRM. Todos los modelos 709-RVC y el SeeLeveL Soul son compatibles con el GX.
Limitaciones
Cuando se configura un puerto CAN-bus de un dispositivo GX para RV-C, no puede usarse a la vez para las funciones VE.Can o NMEA 2000. Tiene que ser VE.Can/NMEA 2000 o RV-C, pero no las dos en el mismo puerto.
Dispositivos como Venus GX, Cerbo GX MK2 y Ekrano GX, que tienen dos puertos VE.Can completamente funcionales, admiten VE.Can y RV-C funcionando en paralelo.
Si el uso de RV-C bloquea la conectividad VE.Can esencial de su dispositivo GX, le recomendamos que use en su lugar SeeLeveL 709-N2K de Garnet, que se comunica mediante NMEA 2000 y evita estas limitaciones.
Los niveles del depósito mostrados en el dispositivo GX (y en VRM) aparecerán solo como porcentajes. El sistema no muestra el volumen en litros, galones u otras unidades.
16.5.1. Conexión del sensor del nivel de depósito SeeLeveL II 709-RVC de Garnet a un dispositivo GX
Antes de conectarlo a un dispositivo GX, compruebe que el SeeLeveL 709-RVC de Garnet se ha instalado y configurado de conformidad con las instrucciones de instalación de Garnet.
El dispositivo GX necesita un conector RJ45 en su puerto VE.Can, mientras que el panel SeeLeveL de Garnet suele proporcionar uno de los siguientes:
Un conector RV-C multipin o
Una conexión por cable con un cable negro, uno azul y uno blanco.
Para conectar los dos debe hacerse un cable adaptador basado en las asignaciones de pines que se facilitan a continuación.
Un cable Ethernet CAT5 estándar es adecuado para este fin. Un extremo del cable se corta y se conecta a los cables del panel de Garnet, mientras que el conector RJ45 permanece en el extremo del dispositivo GX.
Código de colores de los cables del panel del Garnet | Conector RV-C | VE.Can RJ45 de Victron | Código de colores de los cables de CAT5 Ethernet | Señal |
|---|---|---|---|---|
Negro | 4 | 3 | Verde/Blanco | Puesta a tierra |
Azul | 3 | 8 | Marrón | CAN-L |
Blanco | 2 | 7 | Marrón/Blanco | CAN-H |
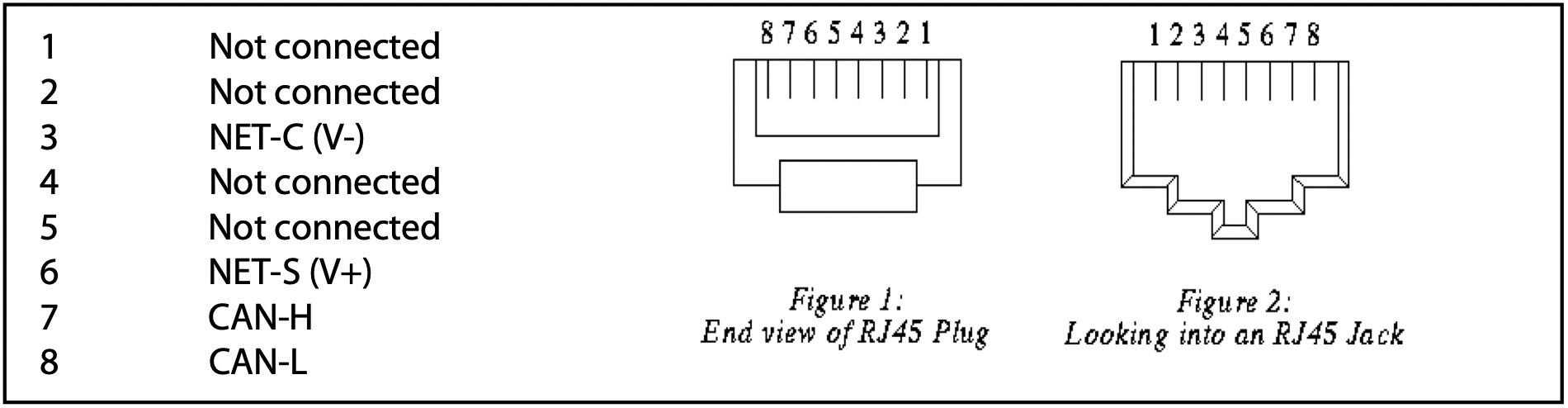 |
Pinout VE.Can de Victron
16.5.2. Instalación y configuración
Lleve el cable desde el panel del Garnet hasta el dispositivo GX.
Asegúrese de que el panel Garnet y el dispositivo GX están apagados.
Conecte el enchufe RJ45 al puerto VE.Can al dispositivo GX y el otro extremo al cable adaptador del panel del Garnet.
Revise la terminación del bus:
Para el dispositivo GX, utilice el terminador RJ45 VE.Can azul proporcionado.
Es obligatorio hacer un remate adecuado, sobre todo si el SeeLeveL de Garnet es el único dispositivo RV-C del bus.
Una vez que todo esté conectado, encienda los dos dispositivos.
Termine la instalación siguiendo los pasos del capítulo de configuración de RV-C para configurar el puerto VE.Can para el perfil RV-C.