16. Suporte RV-C.
16.1. Introdução ao RV-C.
Desde o Venus OS v2.90, a Victron é compatível com o protocolo RV-C.
O que é o protocolo RV-C?
RV-C (Recreational Vehicle-CAN) é um protocolo de comunicação com base em CAN bus, semelhante ao NMEA 2000 para embarcações. É amplamente utilizado nos EUA para permitir que componentes e aparelhos de veículos de lazer comuniquem entre si.
Existem duas funções básicas:
Saída RV-C: Permite que os dispositivos Victron sejam monitorizados e controlados através de um painel de controlo RV-C.
Entrada RV-C: Permite que os dispositivos Victron GX recebam e visualizem dados de dispositivos RV-C de terceiros compatíveis.
Em resumo, quando esta função estiver ativada com o dispositivo GX ligado a uma rede RV-C, um painel de controlo RV-C pode ler dados Victron, por exemplo, a partir de um BMV ou de um inversor/carregador e apresentá-los ao utilizador ou até controlar alguns deles. Os dispositivos RV-C compatíveis são apresentados na unidade GX em simultâneo.
O RV-C baseia-se em SAE J1939.
16.2. Limitações
Dispositivos VE.Can
Os protocolos RV-C e VE.Can não são compatíveis. Uma porta VE.Can num dispositivo GX pode ser configurada para o perfil VE.Can ou para o perfil RV-C, mas não para ambos em simultâneo.
Alguns dispositivos GX apenas podem ter uma porta VE.Can funcional. Portanto, quando for necessária conectividade RV-C, estes limites com outros dispositivos podem ser usados no sistema.
Produtos típicos relacionados com a RV, que, por conseguinte, não podem ser utilizados na situação descrita anteriormente:
O Lynx Smart BMS e o Lynx BMS NG não podem ser utilizados, uma vez que precisam de uma ligação VE.Can. Utilize um VE.Bus BMS como alternativa (liga-se através de VE-Bus).
O Lynx Smart Shunt não é compatível, utilize um SmartShunt (conectável através da VE.Direct).
O regulador do alternador Wakespeed não pode ser monitorizado através do dispositivo GX.
Os controladores de carga MPPT de elevada potência devem ser conectados através de VE.Direct, não de VE.Can.
Compatibilidade do dispositivo GX
Dependendo do sistema, esta limitação afeta a seleção de um dispositivo GX:
Color Control GX (CCGX), MultiPlus-II GX e EasySolar-II GX: cada tem apenas uma porta VE.Can, que pode ser configurada para VE.Can ou RV-C, não para ambos. Por exemplo, não pode utilizar um Lynx Smart BMS e efetuar a ligação a uma rede RV-C em simultâneo.
Cerbo GX e Cerbo-S GX: Como acima, estes modelos têm apenas uma porta VE.Can funcional. De novo, pode ser VE.Can ou RV-C, não ambos.
Nota
Nota: A porta BMS-Can no Cerbo GX está limitada e não pode ser utilizada para RV-C.
Cerbo GX MK2: Praticamente idêntico ao Cerbo GX, com dois VE.Can, permitindo a ligação simultânea às redes VE.Can e RV-C.
Venus GX: Equipado com duas portas VE.Can, permitindo a ligação simultânea às redes VE.Can e RV-C.
Ekrano GX: Também tem duas portas VE.Can e podem ser ligados ao VE.Can e RV-C em simultâneo.
16.3. Dispositivos compatíveis
Como o Venus OS v2.90, a compatibilidade com a saída RV-C foi adicionada a uma seleção de produtos Victron. Os seguintes dispositivos são compatíveis:
Produto Victron | Observações |
|---|---|
Inversor/carregador VE.Bus | O inversor e o carregador podem ser controlados separadamente (ligar/desligar) através de RV-C. Também é possível definir o limite da entrada da corrente de cais. |
Carregador Smart IP43 120 V - 240 V | Pode ser ligado / desligado através de RV-C. O limite da corrente de entrada do cais é configurável. |
Carregador Smart IP43 230 V | Apenas leitura por RV-C. Não pode ser controlado. |
Skylla-i e Skylla-IP44/IP65 | Requer duas interfaces CAN-bus totalmente funcionais. Atualmente apenas compatível com Venus GX, Cerbo GX MK2 e Ekrano GX. |
Inversor VE.Direct | |
Inversor Smart e inversor RS | |
Carregadores solares incluindo MPPT RS | |
Baterias:
| |
Depósitos: Dos dados do nível do depósito são compatíveis das seguintes fontes de entrada:
|
16.4. Configuração RV-C
O RV-C é configurado através do dispositivo GX:
Após a seleção, o perfil RV-C torna-se ativo e o perfil selecionado previamente é desativado (equipamento associado como dispositivos VE.Can ficam indisponíveis no GUI). |    |
16.4.1. Configuração de dispositivos de saída RV-C
Os dispositivos de saída RV-C podem ser configurados a partir do submenu Dispositivos no menu da porta VE.Can. | |
O submenu Dispositivos contém todos os dispositivos da rede RV-C, incluindo dispositivos de saída RV-C. Estes últimos são identificados pela sua [instância de VRM#], que pode ser utilizada para determinar os dispositivos «reais» a partir do menu raiz do dispositivo GX. O hexadecimal no lado direito é o Endereço de Origem. |  |
Quando entra no submenu de um dispositivo RV-C, irá visualizar a informação geral do mesmo e, mais importante, o menu de configuração, se se deslocar para baixo até à parte inferior da página. A visualização do menu de configuração requer, pelo menos, o nível de acesso do utilizador e do instalador; consulte a secção Estrutura do menu e parâmetros configuráveis. |  |
A instância dos DGN correspondentes pode ser alterada no submenu Configuração. |  |
16.5. Suporte do dispositivo Garnet SeeLevel II 709-RVC & Victron GX
Com a compatibilidade RV-C em Venus OS, o Garnet SeeLevel 709-RVC e SeeLevel Soul pode ser utilizado para mostrar os dados do nível do depósito tanto no dispositivo GX e VRM. Todos os modelos 709-RVC e SeeLevel Soul são compatíveis com o GX.
Limitações
Quando uma porta CAN-bus num dispositivo GX estiver configurado para RV-C, não deve ser utilizado em simultâneo para as funções VE.Can ou NMEA 2000. Deve ser VE.Can/NMEA 2000 ou RV-C, não pode ser ambos na mesma porta.
Os dispositivos como Venus GX, Cerbo GX MK2 e Ekrano GX, que têm duas portas VE.Can completamente funcionais, podem suportar a VE.Can e RV-C em paralelo.
Se a utilização de RV-C bloquear a conectividade VE.Can essencial no seu dispositivo GX, é recomendável utilizar o Garnet SeeLevel 709-N2K em alternativa, que comunica por NMEA 2000 e evita estas limitações.
Os níveis do depósito no dispositivo GX (e VRM) vão aparecer apenas nas percentagens. O sistema não mostra o volume em litros, galões ou outras unidades.
16.5.1. Conectar o sensor de nível do tanque Garnet SeeLevel II 709-RVC a um dispositivo GX
Antes de efetuar a ligação a um dispositivo GX, certifique-se de que o Garnet SeeLevel 709-RVC está instalado e configurado corretamente de acordo com as instruções de instalação do Garnet.
O dispositivo GX precisa de um conector RJ45 na porta VE.Can, enquanto um painel normalmente proporciona Garnet SeeLevel:
Um conector RV-C multipinos, ou
Uma ligação com fios com um fio negro, um azul e um branco.
Para ligar os dois, deve ser feito um cabo adaptador com base nas atribuições de pino proporcionadas abaixo.
Um cabo Ethernet CAT5 é adequado para esta finalidade. Uma extremidade do cabo é cortada e conectada aos fios do painel Garnet, enquanto a ficha permanece na extremidade do dispositivo GX.
Código de cor do fio do painel Garnet | Conector RV-C | Victron VE.Can RJ45 | Código de cor do fio Ethernet CAT5 | Sinal |
|---|---|---|---|---|
Negro | 4 | 3 | Verde / branco | Terra |
azul | 3 | 8 | Castanho | CAN-L |
Branco | 2 | 7 | Castanho / branco | CAN-H |
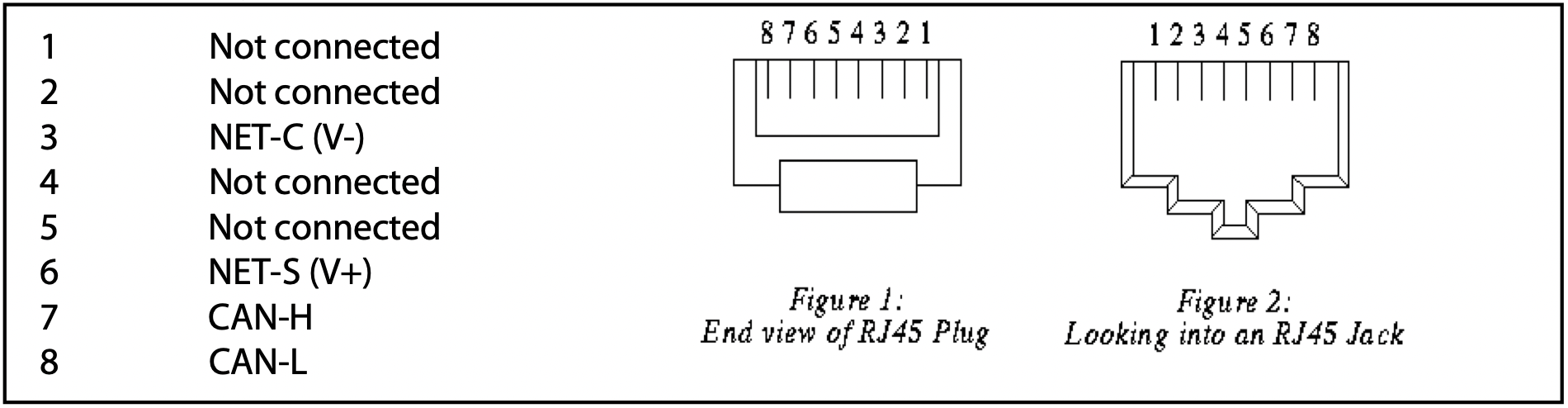 |
Pinos de saída Victron VE.Can
16.5.2. Instalação e configuração
Encaminhe o cabo do painel Garnet para o dispositivo GX.
Certifique-se de que o painel Garnet e o dispositivo GX estão desligados.
Conecte a ficha RJ45 à porta VE.Can do dispositivo GX e a outra extremidade do cabo adaptador ao painel Garnet.
Verifique a terminação do barramento:
Para o dispositivo GX, utilize o terminador RJ45 VE.Can fornecido.
Uma terminação adequada é essencial, especialmente se o Garnet SeeLevel for o único dispositivo RV-C no barramento.
Quando tudo estiver ligado, ligue os dois dispositivos.
Conclua a configuração seguindo os passos na secção Configuração RV-C para configurar a porta VE.Can para o perfil RV-C.