16. Supporto RV-C
16.1. Introduzione RV-C
A partire dal Venus OS v2.90, Victron supporta il protocollo RV-C.
Che cos'è il protocollo RV-C?
L’RV-C (Recreational Vehicle-CAN) è un protocollo di comunicazione basato sul bus CAN, simile a NMEA 2000 per le imbarcazioni. È ampiamente utilizzato negli Stati Uniti per consentire ai componenti e alle apparecchiature dei camper di comunicare tra loro.
L'RV-C ha due funzioni principali:
Uscita RV-C: Permette di monitorare e controllare i dispositivi Victron tramite un pannello di controllo RV-C.
Ingresso RV-C: Consente ai dispositivi Victron GX di ricevere e visualizzare dati da dispositivi RV-C di terze parti compatibili.
In sintesi, quando questa funzione è attivata e il dispositivo GX è collegato a una rete RV-C, un pannello di controllo RV-C può leggere i dati Victron, ad esempio da un BMV o da un inverter/caricabatterie, e mostrarli all'utente o addirittura controllarne alcuni. I dispositivi RV-C compatibili vengono visualizzati contemporaneamente sull'unità GX.
Il RV-C si basa sulla norma SAE J1939.
16.2. Limitazioni
Dispositivi VE.Can
I protocolli RV-C e VE.Can non sono compatibili. È possibile configurare una porta VE.Can di un dispositivo GX per il profilo VE.Can o per il profilo RV-C, ma non per entrambi allo stesso tempo.
Alcuni dispositivi GX dispongono di una sola porta VE.Can completamente funzionale e questo limita la possibilità di utilizzare altri dispositivi nel sistema quando è richiesta la connettività RV-C.
Prodotti tipici relativi a RV, che quindi non possono essere utilizzati nella situazione descritta sopra:
Non è possibile utilizzare Lynx Smart BMS e Lynx BMS NG, poiché richiedono una connessione VE.Can. Utilizzare piuttosto un BMS VE.Bus (si collega tramite VE.Bus).
Il Lynx Smart Shunt non è compatibile: al suo posto, utilizzare uno SmartShunt (si collega tramite VE.Direct).
Il regolatore dell'alternatore Wakespeed non può essere monitorato tramite il dispositivo GX.
I regolatori di carica MPPT ad alta potenza devono essere collegati tramite VE.Direct, non tramite VE.Can.
Compatibilità con i dispositivi GX
A seconda della progettazione del sistema, questa limitazione influisce sulla scelta del dispositivo GX:
Color Control GX (CCGX), MultiPlus-II GX e EasySolar-II GX: ognuno di essi dispone di una sola porta VE.Can, che può essere configurata per VE.Can o RV-C, non per entrambe. Ad esempio, non è possibile utilizzare un Lynx Smart BMS e collegarsi contemporaneamente a una rete RV-C.
Cerbo GX e Cerbo-S GX: Come nel caso precedente, questi modelli dispongono di una sola porta VE.Can funzionale, pertanto si possono configurare per VE.Can o RV-C, ma non per entrambe.
Nota
Nota: La porta BMS-Can del Cerbo GX è limitata e non può essere utilizzata per l’RV-C.
Cerbo GX MK2: Quasi identico al Cerbo GX, ma con due porte VE.Can, che consentono la connessione simultanea a entrambe le reti VE.Can e RV-C.
Venus GX: Dotato di due porte VE.Can, che consentono la connessione alle due reti VE.Can e RV-C contemporaneamente.
Ekrano GX: Dotato di due porte VE.Can, quindi può essere collegato contemporaneamente a entrambe le reti VE.Can e RV-C.
16.3. Dispositivi supportati
A partire dal Venus OS v2.90, è stato aggiunto il supporto dell'uscita RV-C a una serie di prodotti Victron. Sono supportati i seguenti dispositivi:
Prodotto Victron | Osservazioni |
|---|---|
Inverter/caricabatterie VE.Bus | Le funzioni dell'inverter e del caricabatterie si possono controllare separatamente (on/off) tramite RV-C. È inoltre possibile impostare il limite di corrente di ingresso da banchina. |
Caricabatterie Smart IP43 120-240 V | Può essere attivato/disattivato tramite RV-C. È possibile impostare il limite di corrente di ingresso banchina. |
Caricabatterie Smart IP43 230 V | Sola lettura tramite RV-C. Non può essere controllato. |
Skylla-i e Skylla-IP44/-IP65 | Richiede due interfacce CAN-bus completamente funzionali. Attualmente supportato solo da Venus GX, Cerbo GX MK2 ed Ekrano GX. |
Inverter VE.Direct | |
Inverter Smart e Inverter RS | |
Caricabatterie solari con MPPT RS | |
Batterie:
| |
Serbatoi: I dati del livello del serbatoio sono supportati dalle seguenti fonti di ingresso:
|
16.4. Configurazione RV-C
L’RV-C viene configurato tramite il dispositivo GX:
Una volta selezionato, il profilo RV-C diventa attivo e il profilo precedentemente selezionato si disattiva (le apparecchiature associate, come i dispositivi VE.Can, diventano non disponibili nella GUI). |    |
16.4.1. Configurazione dei dispositivi di uscita RV-C
I dispositivi di uscita RV-C possono essere configurati dal sottomenu Dispositivi nel menu della porta VE.Can. | |
Il sottomenu Dispositivi contiene tutti i dispositivi della rete RV-C, compresi i dispositivi di uscita RV-C. Questi ultimi sono identificati dalla loro [istanza VRM#], che può essere usata per identificare i dispositivi "reali" nel menu principale del dispositivo GX. L'esadecimale sul lato destro rappresenta l'indirizzo di origine. |  |
Quando si accede al sottomenu di un dispositivo RV-C, si visualizzano le informazioni generali del dispositivo stesso e, soprattutto, il menu di configurazione se si scorre la pagina fino in fondo. La visualizzazione del menu di configurazione richiede almeno il livello di accesso utente e installatore, vedere il capitolo Struttura del menu e parametri configurabili. |  |
L'istanza per i DGN corrispondenti può essere modificata nel sottomenu Configurazione. |  |
16.5. Supporto del Garnet SeeLevel II 709-RVC e del dispositivo GX Victron
Grazie al supporto dell’RV-C in Venus OS, è possibile utilizzare il Garnet SeeLevel 709-RVC e il SeeLevel Soul per visualizzare i dati del livello del serbatoio sia sul dispositivo GX che sul VRM. Tutti i modelli 709-RVC e il SeeLevel Soul sono compatibili con il GX.
Limitazioni
Se una porta CAN-bus di un dispositivo GX è configurata per RV-C, non può essere utilizzata contemporaneamente per le funzioni VE.Can o NMEA 2000. È possibile utilizzare VE.Can/NMEA 2000 o RV-C, non entrambi sulla stessa porta.
Dispositivi come Venus GX, Cerbo GX MK2 ed Ekrano GX, che dispongono di due porte VE.Can completamente funzionali, supportano l'esecuzione di VE.Can e RV-C in parallelo.
Se l'uso dell’RV-C blocca la connettività essenziale di VE.Can sul dispositivo GX, si consiglia di utilizzare piuttosto il Garnet SeeLevel 709-N2K, che comunica tramite NMEA 2000 ed evita queste limitazioni.
I livelli dei serbatoi visualizzati sul dispositivo GX (e sul VRM) appariranno solo in percentuale. Il sistema non visualizza il volume in litri, galloni o altre unità.
16.5.1. Cablaggio del sensore di livello del serbatoio Garnet SeeLevel II 709-RVC a un dispositivo GX
Prima di collegarsi a un dispositivo GX, assicurarsi che il Garnet SeeLevel 709-RVC sia stato installato e configurato correttamente secondo le istruzioni di installazione di Garnet.
Il dispositivo GX richiede che la sua porta VE.Can sia dotata di un connettore RJ45, mentre il pannello Garnet SeeLevel in genere fornisce:
O un connettore RV-C a più pin, oppure
Un collegamento cablato con un cavo nero, uno blu e uno bianco.
Per collegare i due dispositivi, è necessario realizzare un cavo adattatore in base alle assegnazioni dei pin riportate di seguito.
Il cavo Ethernet CAT5 standard è adatto a questo scopo. Un'estremità del cavo viene tagliata e collegata ai cavi del pannello Garnet, mentre la spina RJ45 rimane all'estremità del dispositivo GX.
Codice colore dei fili del pannello Garnet | Connettore RV-C | Victron VE.Can RJ45 | Codice colore dei fili Ethernet CAT5 | Segnale |
|---|---|---|---|---|
Nero | 4 | 3 | Verde/bianco | Terra |
Blu | 3 | 8 | Marrone | CAN-L |
Bianco | 2 | 7 | Marrone/bianco | CAN-H |
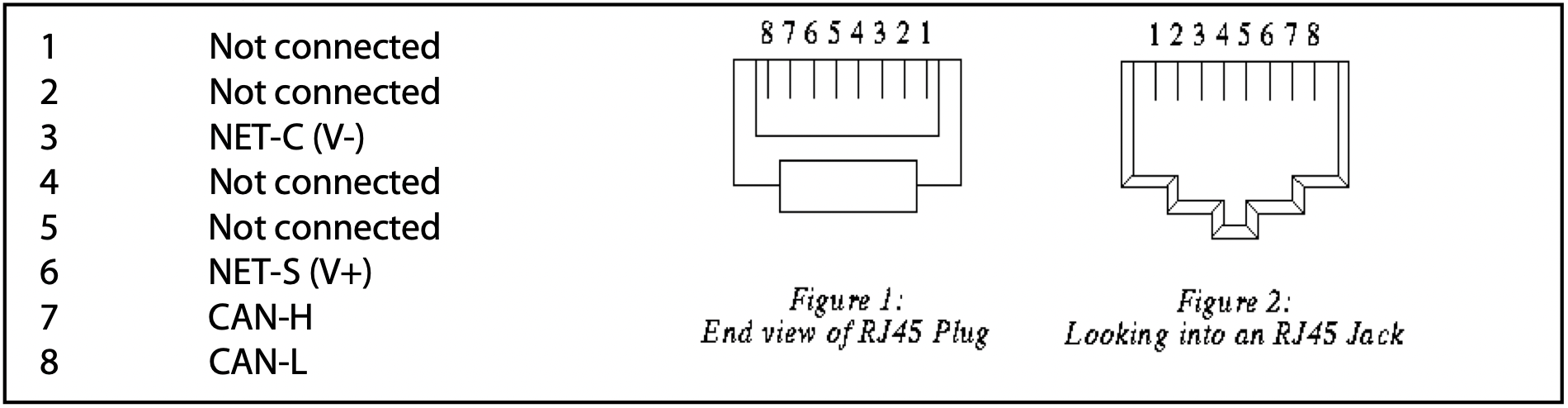 |
Pinout Victron VE.Can
16.5.2. Installazione e configurazione
Far passare il cavo dal pannello Garnet al dispositivo GX.
Assicurarsi che sia il dispositivo Garnet che il dispositivo GX siano spenti.
Collegare il connettore RJ45 alla porta VE.Can del dispositivo GX e l'altra estremità del cavo adattatore al pannello Garnet.
Controllare la terminazione del bus:
Per il dispositivo GX, utilizzare il terminatore RJ45 VE.Can blu in dotazione.
La corretta terminazione è obbligatoria, soprattutto se il Garnet SeeLevel è l'unico dispositivo RV-C sul bus.
Una volta installato tutto correttamente, alimentare entrambi i dispositivi.
Completare la configurazione come spiegato nella sezione riguardante il capitolo Configurazione dell’RV-C, per configurare la porta VE.Can per il profilo RV-C.